先日購入したラズパイzeroを使って2足歩行ロボットを作成することにしました。
[amazonjs asin=”4274201244″ locale=”JP” title=”二足歩行ロボット製作超入門―バッテリーからRCサーボまで (RoboBooks)”]
上記の本を参考に作ってみようと思ったのですが、ボディーのパーツにアルミ板が使用されており、加工するには様々な工具、技術が必要のようでしたので、今回はもう少しハードルを下げて、プラ板(厚さ3mm)でパーツを作成することにしました。まずは材料、工具集めです。プラ板にネジ穴をあける必要があるので、
[amazonjs asin=”B01LX208SY” locale=”JP” title=”タミヤ クラフトツールシリーズ No.41 電動ハンディドリル 組み立て式 プラモデル用工具 74041″]
を購入しました。プラモデルを作るような感覚で組み立てる必要がありますが、ボンドは不要ですので説明書に従って行けばそれほど苦労せずに作れると思います。
また、プラ板をカットしたり、四角の穴をあけるために
[amazonjs asin=”B002RVEYGG” locale=”JP” title=”オルファ(OLFA) PカッターS型 204B”]
を購入しました。
あとは、プラ板を直角に曲げるための道具が必要なのですが、こちらのサイトでは発泡スチロール用のカッターで曲げる方法が紹介されていたので、
[amazonjs asin=”B000ZX7028″ locale=”JP” title=”白光 電池式スチロールカッター No.251-01″]
も購入しました。これでプラ板を切ると嫌な匂いのする煙が出るので、まともに吸わないように気をつけたほうが良さそうです。使い心地は良い感じで、最初はプラ板を曲げるために使用してましたが、そのうちカットするのにも使うようになり重宝しました。ただ、これを使って3mmの厚さのプラ板を曲げるのはやっぱり難しいです。曲げる時にどうしても折り目近くの表面が裂けてしまって強度が落ちてしまうのです(多分厚すぎるのでしょう。2mmくらいが限界かと思います)。また、直角に曲げるのも相当難しくて、どうしても折り目の位置がずれたり、90度にならなかったりしました。
あとはサーボモータを取り付ける時に使うネジ(1.4M、長さが7mm)をコーナンで購入しました。ちょっと長すぎるのですが、適当なのがなかったのでこれにしました。プラ板は
[amazonjs asin=”B002DR3H8U” locale=”JP” title=”タミヤ 楽しい工作シリーズ No.147 プラボード3mm厚B4サイズ 1枚入 (70147)”]
を購入。分厚いですが、軽いです。以上がロボット製作のために購入した材料、工具です。あとはありもの(大きめのネジとかサーボモータSG90)を使用することにしました。
ちなみにプラ板で作成するボディの構成要素としては足、脚、腰だけです。上半身はどんな部品を載っけるか、決まってから増築しようと思ってます。
続いては下半身ボディの設計についてです。これらの構成要素の寸法や穴の位置を決めるため、FreeCADと言うフリーソフトを使いました。最初は紙に書いてましたが、そのうち正確に書きたくなったのでこのソフトを使うようになりました。

上記がFreeCADでロボットの下半身を編集している画面(まだ未完成)です。ワークベンチとしてはPartをメインに使い、穴をあけたりエッジを削る時には Part Designを使用しました。今回使用したサーボモータSG90のデータについてはフリーのライブラリの中からインポートして使いました。
作成については、基本上記の図面を元にしてプラ板を切ったり、ドリルで穴あけたり、スチロールカッターで穴を開けて部品を作り、ネジでそれらをつなぎ合わせる、といった感じです。とにかくプラ板を曲げるのに苦労しました。上でも書きましたが、3mm厚のプラ板をスチロールカッターで曲げるのはちょっと無理がありそうです。結局ほとんど表面の折り目が裂けてしまったので、ホットボンドで補強しました。
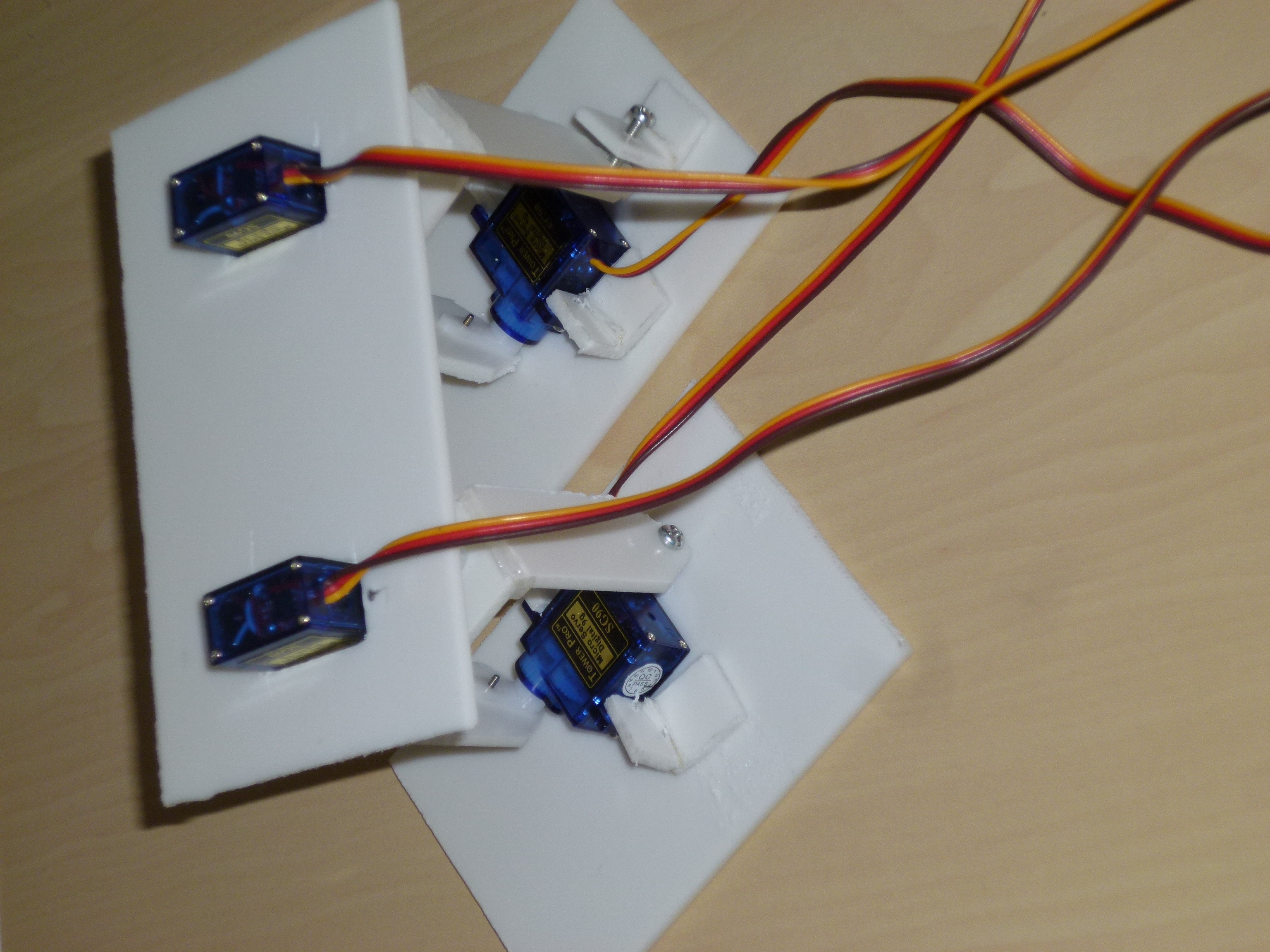
上記がとりあえず完成した下半身ボディ(後ろから写してます)です。サーボモータはSG90を4個搭載しています。まだ基板やらバッテリーについては載せてませんが、そのうち全部載せるつもりです(目標はワイヤレス)。